Alternating Least Squares#
Common steps for Recommendation Systems
[1]:
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
[2]:
ratings = pd.read_csv('/opt/datasetsRepo/RecommendationData/ratings.csv')
ratings.head()
[2]:
| userId | movieId | rating | timestamp | |
|---|---|---|---|---|
| 0 | 1 | 1 | 4.0 | 964982703 |
| 1 | 1 | 3 | 4.0 | 964981247 |
| 2 | 1 | 6 | 4.0 | 964982224 |
| 3 | 1 | 47 | 5.0 | 964983815 |
| 4 | 1 | 50 | 5.0 | 964982931 |
[3]:
idx_to_userid_mapper = dict(enumerate(ratings.userId.unique()))
userid_to_idx_mapper = dict(zip(idx_to_userid_mapper.values(), idx_to_userid_mapper.keys()))
[4]:
idx_to_movieid_mapper = dict(enumerate(ratings.movieId.unique()))
movieid_to_idx_mapper = dict(zip(idx_to_movieid_mapper.values(), idx_to_movieid_mapper.keys()))
[5]:
len(idx_to_userid_mapper), len(userid_to_idx_mapper)
[5]:
(610, 610)
[6]:
len(idx_to_movieid_mapper), len(movieid_to_idx_mapper)
[6]:
(9724, 9724)
[7]:
ratings['user_idx'] = ratings['userId'].map(userid_to_idx_mapper).apply(np.int32)
ratings['movie_idx'] = ratings['movieId'].map(movieid_to_idx_mapper).apply(np.int32)
ratings.head(10)
[7]:
| userId | movieId | rating | timestamp | user_idx | movie_idx | |
|---|---|---|---|---|---|---|
| 0 | 1 | 1 | 4.0 | 964982703 | 0 | 0 |
| 1 | 1 | 3 | 4.0 | 964981247 | 0 | 1 |
| 2 | 1 | 6 | 4.0 | 964982224 | 0 | 2 |
| 3 | 1 | 47 | 5.0 | 964983815 | 0 | 3 |
| 4 | 1 | 50 | 5.0 | 964982931 | 0 | 4 |
| 5 | 1 | 70 | 3.0 | 964982400 | 0 | 5 |
| 6 | 1 | 101 | 5.0 | 964980868 | 0 | 6 |
| 7 | 1 | 110 | 4.0 | 964982176 | 0 | 7 |
| 8 | 1 | 151 | 5.0 | 964984041 | 0 | 8 |
| 9 | 1 | 157 | 5.0 | 964984100 | 0 | 9 |
References#
Intro#
ALS algorithm works by alternating between rows and columns to factorized the matrix.
Stochastic Gradient Descent
Flexibility - Already using it for a lot of different problems and algorithms
Parallel - scaling matrix factorization
Slower - iterative
Hard to handle unobserved interaction (sparsity)
Alternating Least Square
only works for least square problems only
Parallel
Faster
Easy to handle sparsity
Approach#
movies (n) k n
+---------------------+ +------+ +----------------------+
| | | | x | movie | k
| | | user | | factor | V
| | |factor| +----------------------+
users(m) | | | |
| RATINGS | ~ | |
| | ~ | | m
| | | |
| | | |
| | | |
+---------------------+ +------+
U
Iterative Algorithm
fix V, compute U
fix U, compute V
Compare with SVD#
Matrix Factorization Method.
+----------------------+
K |______________________|
| |
items K +----------------------+
+---------------------+ +-------+
| | | | |
|u | | | |
|s | | | |
|e | ~ | | |
|r | ~ | | |
|s | | | |
| | | | |
| | | | |
+---------------------+ +-------+
X V x VT
row factors (items embeddings)
/
Factorization
\
column factors (user embeddings)
In SVD the missing observations has to be fill as zeros.
\(| A - U V^T |^2\)
item1 item2 item3 item4
+------+------+------+------+
user1 | 1 | 0 | 0 | 1 |
+------+------+------+------+
user2 | 0 | 1 | 0 | 0 |
+------+------+------+------+
user3 | 0 | 1 | 0 | 0 |
+------+------+------+------+
user4 | 0 | 0 | 1 | 0 |
+------+------+------+------+
This leads to a large assumption for business and it impacts results heavily due to large percentage of assumptions.
In ALS we use rows and columns alternatively as features, hence no need to fill missing values.
\(\sum_{i,j \in obs} (A_{ij} - U_i V_j^T)^2\)
item1 item2 item3 item4
+------+------+------+------+
user1 | 1 | | | 1 |
+------+------+------+------+
user2 | | 1 | | |
+------+------+------+------+
user3 | | 1 | | |
+------+------+------+------+
user4 | | | 1 | |
+------+------+------+------+
[8]:
user_movie_matrix = ratings.pivot_table(values=['rating'] ,index=['user_idx'], columns=['movie_idx'])
[9]:
user_movie_matrix.head(5)
[9]:
| rating | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| movie_idx | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | ... | 9714 | 9715 | 9716 | 9717 | 9718 | 9719 | 9720 | 9721 | 9722 | 9723 |
| user_idx | |||||||||||||||||||||
| 0 | 4.0 | 4.0 | 4.0 | 5.0 | 5.0 | 3.0 | 5.0 | 4.0 | 5.0 | 5.0 | ... | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| 1 | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | ... | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| 2 | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | ... | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| 3 | NaN | NaN | NaN | 2.0 | NaN | NaN | NaN | NaN | NaN | NaN | ... | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| 4 | 4.0 | NaN | NaN | NaN | 4.0 | NaN | NaN | 4.0 | NaN | NaN | ... | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
5 rows × 9724 columns
Algorithm#
Initiate row factor U, column factor V
Repeat until convergence
for i = 1 to n do (iterating over rows)
\(u_i = (\sum_{r_{i,j} \in r_{i*}} {v_j v_j^T + \lambda I_k })^{-1} \sum_{r_{i,j} \in r_{i*}}{r_{ij} v_j}\)
end for [solving for row factors when column factors are features]
for i = 1 to m do (iterative over columns)
\(v_i = (\sum_{r_{i,j} \in r_{*j}} {u_i u_i^T + \lambda I_k })^{-1} \sum_{r_{i,j} \in r_{*j}}{r_{ij} u_i}\)
end for [solving for column factors when row factors are features]
Similarity between als vs ols with l2 regularization
\(\theta = (X^T X + \lambda I)^{-1} X^T Y\)
\(v_i = (\sum_{r_{{i,j} \in r_{*j}}} {u_i u_i^T + \lambda I_k })^{-1} \sum_{r_{i,j} \in r_{*j}}{r_{ij} u_i}\)
Loss function#
\begin{align*} R \approx U \times V^T\\ \\ \min_{U,V} \sum_{(i,j) \in \text{obs}} ( R_{i,j} - U_i V_j)^2 \end{align*}
[10]:
def loss(R, U, V, M):
# use by mask M to ignore NaNs
return np.sqrt(np.square(R - (U @ V), where=M).sum())
Variables#
factor dimensions, iteration, regularization
[11]:
k = 2
n_iter = 20
lambda_ = 0.1
Rating Matrix
[12]:
R = user_movie_matrix.values
n_users, n_movies = R.shape
Mask
[13]:
M = ~np.isnan(R)
[14]:
M
[14]:
array([[ True, True, True, ..., False, False, False],
[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False],
...,
[ True, True, False, ..., False, False, False],
[ True, False, False, ..., False, False, False],
[ True, False, True, ..., True, True, True]])
Factors initialization
[15]:
u = np.random.rand(n_users, k)
v = np.random.rand(k, n_movies)
[16]:
u.shape, v.shape
[16]:
((610, 2), (2, 9724))
only getting observations (getting non null values from ratings)
[17]:
obs = ~np.isnan(R[0])
v[:,obs] @ R[0,obs]
[17]:
array([527.78422239, 515.52004112])
[18]:
obs = ~np.isnan(R[:,0])
u[obs,:].T @ R[obs, 0], u.T[:,obs] @ R[obs, 0]
[18]:
(array([422.3755339 , 419.93792029]), array([422.3755339 , 419.93792029]))
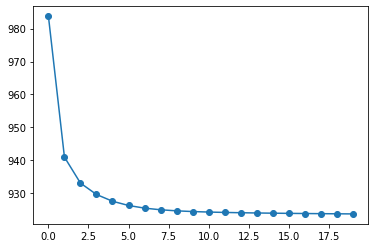
algorithm implemented#
[19]:
l_loss = []
for i_iter in range(n_iter):
for i in range(n_users):
# obs = ~np.isnan(R[i])
obs = M[i] # same thing as above but already calculated and stored in a matrix
u[i] = np.array((v[:,obs] @ R[i,obs]).T @ \
np.linalg.inv((v @ v.T) + (lambda_ * np.eye(k))))
for j in range(n_movies):
# obs = ~np.isnan(R[:,j])
obs = M[:, j]
v[:,j] = np.array((u.T[:, obs] @ R[obs,j]) \
@ np.linalg.inv((u.T @ u) + (lambda_ * np.eye(k))))
l_loss.append(loss(R, u, v, M))
[20]:
plt.plot(l_loss, 'o-');
in a function#
[21]:
def als(R, lambda_, dim_factors, n_iter):
n_u, n_v = R.shape
U = np.random.rand(n_u, dim_factors)
V = np.random.rand(dim_factors, n_v)
M = ~np.isnan(R)
iter_losses = []
for i_iter in range(n_iter):
for i in range(n_u):
obs = M[i]
U[i] = np.array((V[:,obs] @ R[i,obs]).T @ \
np.linalg.inv((V @ V.T) + (lambda_ * np.eye(dim_factors))))
for j in range(n_v):
obs = M[:, j]
V[:,j] = np.array((U.T[:, obs] @ R[obs,j]) @ \
np.linalg.inv((U.T @ U) + (lambda_ * np.eye(dim_factors))))
iter_losses.append(loss(R, U, V, M))
return U,V,iter_losses
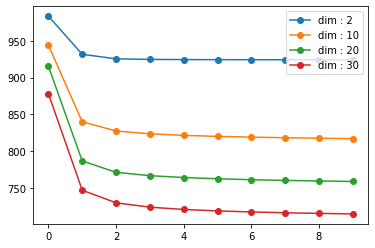
comparing incremental factor dimensions#
[22]:
dims = [2, 10, 20, 30]
for dim in dims:
_, _, losses = als(R, 0.1, dim, 10)
plt.plot(losses, 'o-', label=f"dim : {dim}")
plt.legend(loc='best')
plt.show()
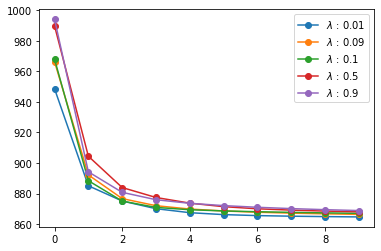
comparing incremental regularization rate#
[23]:
lambdas_ = [0.01, 0.09, 0.1, 0.5, 0.9]
for reg in lambdas_:
_, _, losses = als(R, reg, 5, 10)
plt.plot(losses, 'o-', label=f"$\lambda$ : {reg}")
plt.legend(loc='best')
plt.show()
Weighted Alternating Least Squares (WALS)#
\begin{align} \sum_{i,j \in obs} (A_{ij} - U_i V_j)^2 + w_k \times \sum_{i,j \notin obs} (0 - U_i V_j)^2 \end{align}